
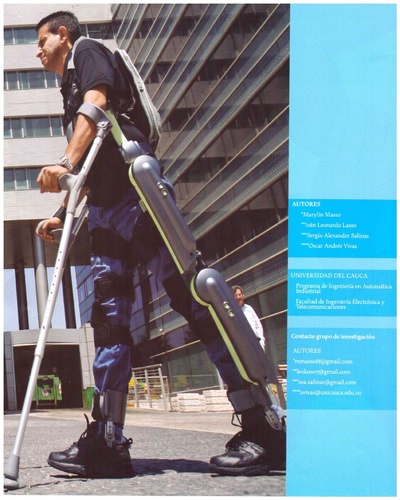
Exoesqueleto para reeducación muscular en pacientes con IMOC tipo diplejía espástica moderada
Artículo barra lateral

Sección: Artículos
Cómo citar
Masso, M., Lasso, I., Salinas, S., & Vivas, O. (2010). Exoesqueleto para reeducación muscular en pacientes con IMOC tipo diplejía espástica moderada. Revista Colombiana De Rehabilitación, 9(1), 6-14. https://doi.org/10.30788/RevColReh.v9.n1.2010.197
Formatos de citación
Contenido principal del artículo
Autores
Maryilin Massommasso88@gmail.com
Iván Leonardo Lasso
Leolasso07@gmail.com
Sergio Alexander Salinas
sea.salinas@gmail.com
Oscar Andrés Vivas
avivas@unicauca.edu.co
Resumen
Este articulo describe el modelo, control y simulación de un exoesqueleto robótico para reeducación de pacientes con daños motores causados por una lesión durante el desarrollo de un cerebro inmaduro, el cual tiene como objetivo optimizar la terpía de rehabilitación y con ella la recuperación del paciente. El diseo propuesto posee diez grados de libertad que describen los movimientos y las restricciones de cada una de las articulaciones de las extremidades inferiores del paciente, el cual realiza movimientos terapeuticos específios obtenidos através de un estudio de trayectoria basadas en la teoría de visión artificial.para garantizar el seguimiento de dichas trayectorias se diseña un control por par calculado (CTC). que permite obtener un error en el orden de los milímetros, suficiente enn procesos de rehabilitación. para evaluar el comportamiento del exoesqueleto en un ambiente tridimensional del paquete MATLAB, el cual fue construido a partir de las piezas diseñadas e importadas desde el software CAD solidEdge .
Palabras clave:




Detalles del artículo
Licencia
Derechos de autor 2010 Revista Colombiana de Rehabilitación
Aquellos autores/as que tengan publicaciones con esta revista, aceptan los términos siguientes:
- Los autores/as conservarán sus derechos de autor y garantizarán a la revista el derecho de primera publicación de su obra, el cuál estará simultáneamente sujeto a la Licencia de reconocimiento de Creative Commons que permite a terceros compartir la obra siempre que se indique su autor y su primera publicación esta revista.
- Los autores/as podrán adoptar otros acuerdos de licencia no exclusiva de distribución de la versión de la obra publicada (p. ej.: depositarla en un archivo telemático institucional o publicarla en un volumen monográfico) siempre que se indique la publicación inicial en esta revista.
- Se permite y recomienda a los autores/as difundir su obra a través de Internet (p. ej.: en archivos telemáticos institucionales o en su página web) antes y durante el proceso de envío, lo cual puede producir intercambios interesantes y aumentar las citas de la obra publicada. (Véase El efecto del acceso abierto).
Los autores que publican en la revista se acogen al código de licencia de Creative Commons Atribución 4.0 Internacional (CC BY 4.0)



Referencias
Aepap, Asociación Española de la Pediatría de Atención Primaria, http://www.aepap.org/familia/paralisici.htm,consultado:septiembre2010.
Fajerman N. y Fernández N. Neurología Pediátrica. Buenos Aires: Editotiral Médica panamericana, 2007.
Borges J. El examen neurológico. México: El manual moderno, 2005.
Sohier, R. Fisioterapia analítica de la articulación de la cader. Bunenos aires: Editorial Médica Panamericana, 2009.
Downie P. Neurología para fisioterapeutas. Buenos Aires: Editorial Médica Panamericana, 2006.
Gonzáles R. Rehabilitación Médica. Barcelona: Editorial Masson S.A., 1997
Zhang J., Dong Y., Yang C., Geng Y., and Yang Y.5-Link model based gait trajectory adaption control strategies of the gait rehabilitation exoeskeleton for post-stroke patients. Mechatronics, 2010,20: 368-376.
Pons J. Wearable Robots: Biomechatronic Exoskeletons. Hoboken: Wiley, 2008.
Carr C. and Newman D. Characterization of a lower-body exoskeleton for simulation of space-suited. Acta Astronautica, 2008, 62: 308-323.
Hidler J,. Wisman W. and Neckel N. Kinematic trajectories while walking within the Lokomat robotic gait-orthosis. Clinical Biomechanics, 2008, 23:1251-1259.
kiguchi K, Rahman M,. Sasaki M., Sasaki M., and teramoto K. Development of a 3 DOF mobile exoskeleton robot for human upper- limb motion assist. Robotics and Autonomous Systems, 2008,56: 678-691.
Gordon K. and ferris D Learning to walk with a robotic ankle exoskeleton. Journal of Biomechanics,2007;40: 2636-2644.
Muscato G. and spampinato G. Kinematical model and control architecture for human inspired five DOF rabotic leg. Mechatronics, 2007,45-63.
Lasso l. y Masso M. Exoesqueleto para reeducación muscular en pacientes con IMOC tipo diplejía espástica moderada. tesis de pregrado. Programa de ingeniería en Automática Industrial. Universidad del Cauca. 2010.
Hoppenfeld S. Exploración física de la columna vertebral y las extremidades. México: El manual moderno,1999.
Khalil and kleinfinger. A new geometric notation for open and colsedloop robots. Proceeding of the IEEE international Conference on Robotics and Automation, San francisco 1986, 1174-1180.
Khalil Wand Creusot D. Symoro; A System for the Symbolic Modeling of Robotics and Automation, San francisco, 1986,1174-1180.
Khalil W and Creusot D. Sysmoro+ A System for the Symbolic Modelling of robots. Robotica. 1997,15:153-161.
Siemens PLM software, www.plmautomation.siemens.com consultado: noviembre 2010.
Miller D. and Morrison W. Prediction of segmental parameters using the Hanavan human body model. Medicine and Science in sports, 1975, 7;207-212
Hanavan E.A Mathematical Model of the Human Body. Aerospace Medical Research Laboratories, Wriht-Patterson Air Force Base. Ohio, United States 1964.
Sciavicco L. and Sicíliano B. Modelling and control of Robot Manipulators London: Springer-Verlag,2005.
Barrientos A. Fundamentos de Robótica. Madrid: Editorial McGraw Hill, 199.
Giancoli, D. Physics for scientistis and Engineers with Modern Physics. Zurich: Pearson Education, 2008.
Tipler P. and Llewellyn R. Modern Physics. New York: W.H.Freeman. 2003
Maxon Motor, www.maxonmotor.com, consultado: agosto2010.
Park C., Ha T, Kim J., and Choi C. Trajectory generation and control for a biped robot walking international journal of control,Automation an systems, 2010, 8.339-351.
Sabourin C. and Bruneau O. Robustness of the dynamic walk of biped robot subjected to disturbing external forces by using CMAC neural networks. Robotics and Autonomous Systems. 2005,51:81-99.
Vermeulen J. Trajectory generation for planar hopping and walking robots . phD Thesis. Vrije Universiteit Brussel, Belgium, 2004.
Gonzáles R. and Woods R. Digital image Processing New York: Prentice Hall, 2002.
Castleman K. Digital Image Processing. London: Prentice Hall, 1995.
Rockmore D. and Healy D. Modern Signal Processing Cambridge: Mathematical Sciences Research Institute Publications, 2004.
Smith S. The Scientist and Engineer´s Guide to Digital Signal Processing. San Diego: California Technical Pub., 1997.
Rabiner L. and Gold B. Theory and Applications of Digital Signal Processing Englewood Cliffs:Prentice Hall, 1997
Vivas A. Diseño y control de Robots Industriales: Teoría y práctica. Buenos Aire: Editorial Elaleph, 2010.
Angeles, J. Fundamentals of Robotic Mechanical Systems New York: Springer, 2007.
Khalil W and Dombre E. Modeling. identification and control of robots. London: Hermes Penton Science,2002.
Virtual Reality, Virtual Reality Toolbox User´s Guide Natick: the Matheow Inc., 2004
Fajerman N. y Fernández N. Neurología Pediátrica. Buenos Aires: Editotiral Médica panamericana, 2007.
Borges J. El examen neurológico. México: El manual moderno, 2005.
Sohier, R. Fisioterapia analítica de la articulación de la cader. Bunenos aires: Editorial Médica Panamericana, 2009.
Downie P. Neurología para fisioterapeutas. Buenos Aires: Editorial Médica Panamericana, 2006.
Gonzáles R. Rehabilitación Médica. Barcelona: Editorial Masson S.A., 1997
Zhang J., Dong Y., Yang C., Geng Y., and Yang Y.5-Link model based gait trajectory adaption control strategies of the gait rehabilitation exoeskeleton for post-stroke patients. Mechatronics, 2010,20: 368-376.
Pons J. Wearable Robots: Biomechatronic Exoskeletons. Hoboken: Wiley, 2008.
Carr C. and Newman D. Characterization of a lower-body exoskeleton for simulation of space-suited. Acta Astronautica, 2008, 62: 308-323.
Hidler J,. Wisman W. and Neckel N. Kinematic trajectories while walking within the Lokomat robotic gait-orthosis. Clinical Biomechanics, 2008, 23:1251-1259.
kiguchi K, Rahman M,. Sasaki M., Sasaki M., and teramoto K. Development of a 3 DOF mobile exoskeleton robot for human upper- limb motion assist. Robotics and Autonomous Systems, 2008,56: 678-691.
Gordon K. and ferris D Learning to walk with a robotic ankle exoskeleton. Journal of Biomechanics,2007;40: 2636-2644.
Muscato G. and spampinato G. Kinematical model and control architecture for human inspired five DOF rabotic leg. Mechatronics, 2007,45-63.
Lasso l. y Masso M. Exoesqueleto para reeducación muscular en pacientes con IMOC tipo diplejía espástica moderada. tesis de pregrado. Programa de ingeniería en Automática Industrial. Universidad del Cauca. 2010.
Hoppenfeld S. Exploración física de la columna vertebral y las extremidades. México: El manual moderno,1999.
Khalil and kleinfinger. A new geometric notation for open and colsedloop robots. Proceeding of the IEEE international Conference on Robotics and Automation, San francisco 1986, 1174-1180.
Khalil Wand Creusot D. Symoro; A System for the Symbolic Modeling of Robotics and Automation, San francisco, 1986,1174-1180.
Khalil W and Creusot D. Sysmoro+ A System for the Symbolic Modelling of robots. Robotica. 1997,15:153-161.
Siemens PLM software, www.plmautomation.siemens.com consultado: noviembre 2010.
Miller D. and Morrison W. Prediction of segmental parameters using the Hanavan human body model. Medicine and Science in sports, 1975, 7;207-212
Hanavan E.A Mathematical Model of the Human Body. Aerospace Medical Research Laboratories, Wriht-Patterson Air Force Base. Ohio, United States 1964.
Sciavicco L. and Sicíliano B. Modelling and control of Robot Manipulators London: Springer-Verlag,2005.
Barrientos A. Fundamentos de Robótica. Madrid: Editorial McGraw Hill, 199.
Giancoli, D. Physics for scientistis and Engineers with Modern Physics. Zurich: Pearson Education, 2008.
Tipler P. and Llewellyn R. Modern Physics. New York: W.H.Freeman. 2003
Maxon Motor, www.maxonmotor.com, consultado: agosto2010.
Park C., Ha T, Kim J., and Choi C. Trajectory generation and control for a biped robot walking international journal of control,Automation an systems, 2010, 8.339-351.
Sabourin C. and Bruneau O. Robustness of the dynamic walk of biped robot subjected to disturbing external forces by using CMAC neural networks. Robotics and Autonomous Systems. 2005,51:81-99.
Vermeulen J. Trajectory generation for planar hopping and walking robots . phD Thesis. Vrije Universiteit Brussel, Belgium, 2004.
Gonzáles R. and Woods R. Digital image Processing New York: Prentice Hall, 2002.
Castleman K. Digital Image Processing. London: Prentice Hall, 1995.
Rockmore D. and Healy D. Modern Signal Processing Cambridge: Mathematical Sciences Research Institute Publications, 2004.
Smith S. The Scientist and Engineer´s Guide to Digital Signal Processing. San Diego: California Technical Pub., 1997.
Rabiner L. and Gold B. Theory and Applications of Digital Signal Processing Englewood Cliffs:Prentice Hall, 1997
Vivas A. Diseño y control de Robots Industriales: Teoría y práctica. Buenos Aire: Editorial Elaleph, 2010.
Angeles, J. Fundamentals of Robotic Mechanical Systems New York: Springer, 2007.
Khalil W and Dombre E. Modeling. identification and control of robots. London: Hermes Penton Science,2002.
Virtual Reality, Virtual Reality Toolbox User´s Guide Natick: the Matheow Inc., 2004
Descargas
La descarga de datos todavía no está disponible.
